МАРИЯ ФРИЗЕН
В России существует мнение, которое можно встретить на форумах и блогах, что чем старше собака, тем более жесткие методы дрессировки необходимо применять для изменения ее поведения и обучения командам. Для исследования была выбрана девятилетняя собака и три команды: двум командам собака была обучена, но выполняла их с недостаточным мастерством, а третья команда – новая – совершенно не знакома собаке. Для обучения командам выбран поощрительный метод – кликер-тренинг. В данном случае результаты исследования подтверждают гипотезу о том, что введение кликер-тренинга для пожилой собаки повысит мастерство выполнения наученных команд с начального уровня до 100% и способствует усвоению новых команд.
В России нередки случаи отказов от взрослых собак из-за проблем поведения (агрессия, неуправляемость, недостаток воспитания). При этом распространено мнение, что взрослые собаки не поддаются дрессировке. А если браться за обучение взрослой собаки, то необходимо использовать жесткие методы, вплоть до использования электрошоковых ошейников.
В России самый распространенный вид дрессировки – это ОКД (Общий курс дрессировки). Курс был разработан для нужд советской армии и основан на контрастном методе. Контрастный метод сочетает в себе поощрение (чаще всего еда, похвала или поглаживание) за правильное выполнение команды и механическое воздействие (рывки поводком, исправление позиции собаки с помощью рук) в случае неправильного выполнения. Так с помощью поощрения и воздействия происходит многократное повторение команды с ожиданием того, что собака усвоит ее. ОКД – это принятый в стране стандарт.
В 2000 году в России впервые был применен метод кликер-тренига в обучении собак (Школа Аджилити Рудашевского, г. Пермь). Инструктор, проводивший обучение, выступила на местной конференции с рефератом («Основы кликер-тренинга», Бондарева Анна, 2002). В реферате отмечено, что «кликер-тренинг отличается от преобладающих в России вариантов контрастного метода обучения… 1. Отсутствие наказания – обучаемый не выполняет поведение от страха…Обучаемый «работает» только, чтобы заслужить подкрепление… при обучении животных никогда не применяется сила (поводок – только, чтобы животное не убежало). 2. Развитие творчества обучаемого. К минимуму сведены подсказки. Обучаемый предлагает варианты поведения, заранее не зная, что от него требуется. Нужные варианты подкрепляются».
Так как в России кликер-тренинг совершенно новый и малораспространенный метод дрессировки, статей с исследованиями возможностей кликер-тренинга в обучении пожилых собак не найдено. Однако имеется переведенная литература о самом методе “кливер-дрессировки” зарубежного автора и основоположника метода Карен Прайор (Karen Pryor) и публикации российских авторов (Владимир Гриценко, 2004). Новый эффективный метод дрессировки собак (Евгения Махиянова, 2010). Дрессировка собак с помощью кликера (Светлана Золотникова “КЛИК-НЯМ”, 2007). Кликер-дрессировка для начинающих» (2009)). Материалы, представленные кинологических журналах, – это либо описание личного опыта инструктора по дрессировке, либо рефераты по известным книгам.
В крупных городах России находит своих единомышленников направление в воспитании собак – обидиенс (Obedience) и спорте – аджилити (Agility), основным методом дрессировки которого является кликер-трениг. Для обучения собак обычно приглашают инструкторов из Европы и США. Широкого распространения кликер-тренинг пока не нашел.
Также необходимо отметить появление совершенно нового подхода, который представляет собой смешение кликер-тренинга и контрастного метода дрессировки. На портале «Мир собак» опубликована статья от 11.03.2011 «Отрицательное подкрепление в кликер-тренинге» (автор Александр Журавлев, инструктор по дрессировке). Автор описывает, что «в подавляющем большинстве материалы по кликер-дрессировке акцентируют внимание только на положительное подкрепление и не говорят об отрицательном подкреплении». Под отрицательным подкреплением в статье понимается: «эмоциональное воздействие (слова, произносимые с негативным оттенком, которые обычно заставляют собаку обратить внимание на дрессировщика и задуматься о своих действиях), отсутствие положительного подкрепления…, ограничение какого-либо движения, используя поводок…, рывки поводком». Что, по сути, является частью контрастной дрессировки и идет вразрез с методологией кликер-тренинга. Основоположник кликер-тренинга писала о методах обучения нового поведения при негативном усилении (то, что у А. Журавлева было определено, как отрицательное подкрепление): «Оно говорит животному, что ряд его действий не будет оплачен» и приводила пример, что дрессировщик может повернуться спиной к собаке (Карен Прайор «Дрессировка собак с помощью кликера», 2005).
В США Б. Ф. Скиннер впервые выявил и описал принципы оперантного научения, которые являются основой для кликер-тренинга. Карен Прайор (Karen Pryor) и Гэри Уилкс (Gary Wilkes) в 1992 году первыми начали проводить семинары по кликер-тренигу для владельцев собак. Этот тренинг нашел широкий отклик не только у любителей собак, но и стал применяться для обучения собак в служебных целях. В данный момент в США кликер-трениг применяют не только по отношению к собакам, но и к лошадям, дельфинам, кошкам, птицам и другим животным. То есть сомнений на счет эффективности данного тренинга нет, однако обсуждается тема этичности его применения. Особенно это касается обучения животных в военных и развлекательных целях. Другие обсуждения происходят вокруг высокой эффективности и возможности усиления нежелательных поведений. Также имеют место быть вопросы о том, что животное может стать зависимым от кликера в руке, а ведь на соревнованиях и на рингах использование кликера запрещено.
Также есть исследования эффективности конфликтных и неконфликтных методов дрессировки. В статье «Survey of the use and outcome of confrontational and non-confrontational training methods in client-owned dogs showing undesired behaviors» Herron M, Shofer F, Reisner I. описываются результаты исследования рисков и последствий применения конфликтных и неконфликтных методов работы с нежелательным поведением собак. Исследование показало, что риск проявления агрессии у собак в ответ на применение конфликтных методов дрессировки зависит от ранее применяемых методов. Риск высок, если ранее хозяева применяли конфликтные методы. При этом риск намного ниже, если ранее использовались только позитивные / неконфликтные методы.
А в статье «The use of electronic collars for training domestic dogs: estimated prevalence, reasons and risk factors for use, and owner perceived success as compared to other training methods» Emily J Blackwell, Christine Bolster, Gemma Richards, Bethany A Loftus and Rachel A Casey описывается исследование, проведенное в Англии, среди владельцев собак, использующих электрошоковые ошейники (ЭШО) и позитивный подход в обучении собак. Задача данного исследования была выявить, какие факторы в большей степени влияют на решение хозяев применять ЭШО. Результаты этого исследования свидетельствуют о том, что несоответствующее ожиданиям хозяина поведение собаки в меньшей степени влияет на решение применения ЭШО. Более значимыми выделены другие факторы, к примеру: пол хозяина, посещение занятий по обучению дрессировке. Замечено, что те, кто прошел обучение, как использовать данный ошейник, предпочитали в дальнейшем не прибегать к этому методу дрессировки, отдавая предпочтение позитивным подходам.
Таким образом, можно сказать, что в США и Англии проводятся исследования методов дрессировки, а наиболее распространенным методом является позитивный. Данная работа направлена на изучение того, насколько эффективным является позитивный метод в обучении пожилой собаки новым командам.
ЭКСПЕРИМЕНТ
Испытуемый
Собака породы лабрадор, 9 лет. Испытуемый выбирался по нескольким критериям:
- Доступность наблюдения и проведения обучения: экспериментатор должен иметь возможность проводить наблюдение и обучение испытуемого по графику (один раз в два дня, через день)
- Испытуемый должен быть обучен двум командам, но выполнять их с недостаточным мастерством и не быть обученным одной команде
- Испытуемый должен знать освобождающую команду «Гуляй» (сигнализирует собаке об окончании упражнения )
- Возраст испытуемого от 7 лет (с этого возраста начинается пожилой возраст у крупных пород )
- Заинтересованность в пищевых поощрениях
Собака, выбранная для эксперимента, обучена командам «Ко мне» (фронтальная посадка), «Рядом» (движение), но выполняет без необходимого мастерства: подходит к человеку по команде «Ко мне», но может не сесть напротив или подойти со спины. Выполняя команду «Рядом» (движение) при ходьбе может отставать от человека или забегать вперед. Команде «Рядом» (сидеть – посадка рядом с левой ногой человека) не обучена.
Материалы
Вербальные стимулы:
- голосовая команда «Ко мне» – произносится четким голосом, настолько громко, что человек находящийся на расстоянии 50м слышит ее (слух собак намного острее, чем у человека, поэтому можно не сомневаться, что собака услышит такую команду)
- голосовая команда «Рядом» – произносится четким голосом, с обычной громкостью, используемой при разговоре с другим человеком (собака в момент команды находится рядом с человеком, поэтому можно не сомневаться в том, что она услышит ее)
- голосовая команда «Гуляй» – произносится четким голосом, с обычной громкостью, используемой при разговоре с другим человеком. Освобождающая команда, которая сигнализирует собаке об окончании упражнения. После произнесения команды, собака отходит от человека и может заняться своими делами
Невербальные стимулы:
- площадка для занятий – поляна в лесу, радиусом примерно 50м
- позиция тела человека (стоит прямо, руки по швам, ноги вместе) – сигнализирует собаке о начале занятия
- хлопок левой рукой по левому бедру (экспериментатор хлопает своей рукой по своему бедру) – сигнализирует собаке о команде «Рядом» (сидеть): сесть рядом с левой ногой человека, так, чтобы правое плечо собаки было рядом с левым коленом человека, передние лапы приблизительно на одной линии с носкам стоп человека
- начало ходьбы – нога человека поднимается, отрывается от земли, сигнализирует собаке о начале движения
- подсказка жест с лакомством – лакомство зажато в руке человека между большим пальцем и ладонью
- подсказка жест – тоже, что и с лакомством, но без него
Поощрения:
- лакомство для собак – безусловное поощрение
- кликер – условное поощрение
Метод наблюдения
Для эксперимента были выбраны три команды. Двум из них собака обучена, но выполняет недостаточно четко:
1. «Ко мне» (фронтальная посадка) – первая зависимая переменная
Собака свободно гуляет по площадке. Экспериментатор произносит команду «Ко мне» четким громким голосом (заранее проверяется громкость: человек находящийся на расстоянии 50м от экспериментатора слышит команду). Как только прозвучала команда, собака идет к экспериментатору, подходит спереди и садится перед ним фронтально, так что ее голова не далее, чем 20 см от ног экспериментатора. Экспериментатор мысленно отсчитывает пять секунд и произносит команду «Гуляй». Собака встает и отходит от экспериментатора.
2. «Рядом» (движение) – вторая зависимая переменная
Собака свободно гуляет по площадке. Экспериментатор подзывает собаку, используя кличку. Когда собака подошла не далее, чем на метр, экспериментатор произносит команду «Рядом» и начинает движение, собака движется слева, рядом с экспериментатором, так что ее правая лопатка находится рядом с коленом, не далее, чем 20см. Экспериментатор мысленно отсчитывает 20 шагов и произносит команду «Гуляй». После этой команды собака переходит в свободное положение, отходит от экспериментатора.
И одна команда, новая для собаки:
3. «Рядом» (сидеть) – третья зависимая переменная
Собака свободно гуляет по площадке. Экспериментатор подзывает собаку, используя кличку. Когда собака подошла не далее, чем на метр, экспериментатор хлопает левой рукой по своему левому бедру. Собака перемещается и садится рядом с левой ногой экспериментатора таким образом, что ее правое плечо рядом с левым коленом человека, а передние лапы приблизительно на одной линии с носкам стоп. Экспериментатор мысленно отсчитывает пять секунд и произносит команду «Гуляй». После этой команды собака переходит в свободное положение, отходит от экспериментатора.
Единицей измерения для всех трех зависимых переменных было выбрано процентное соотношение правильно выполненных команд к общему числу проб. То есть за одно наблюдение проводилось пять проб для каждой из трех команд. Таким образом, 100% – это 5 правильно выполненных проб для одной команды, 80% – это 4 правильно выполненные пробы, 60% – это 3 правильно выполненные пробы, 40% – это 2 правильно выполненные пробы, 20% – это 1 правильно выполненная проба, 0% – это 0 правильно выполненных проб.
Период привыкания проходил спокойно по нескольким причинам. Во-первых, испытуемая собака знакома с площадкой для занятий: она неоднократно была на этой поляне и достаточно ее изучила, хотя это не исключает появление различных стимулов, которые могут влиять на эксперимент. Во-вторых, экспериментатор является проводником собаки, так что собака не просто знакома с ним, а готова к выполнению его команд. В-третьих, испытуемая собака настроена на сотрудничество с экспериментатором: оживляется при произнесении ее клички, бежит к нему, внимательно следит взглядом, слушает голос.
Начальный уровень для команды «Ко мне» варьируется между 20 – 40% правильного выполнения, это 1 – 2 правильно выполненные команды «Ко мне» из 5 проведенных проб. Начальный уровень собирался в течение пяти дней – это минимально допустимое количество дней для наблюдения и фиксации начального уровня, а так как на графике нет сильных флуктуаций, было принято решение переходить к фазе работы.
Начальный уровень для команды «Рядом» (движение) варьируется между 20 – 60%, это 1 – 3 правильно выполненные пробы. Начальный уровень собирался в течение 10 дней: первые 6 дней – имеются флуктуации, 4 последующих дня наблюдения – график стабилизировался на отметке 60%, что говорит в пользу прохождения периода привыкания. Поэтому было принято решение переходить к фазе работы.
Начальный уровень для команды «Рядом» (сидеть) соответствует 0%, так как собака не обучена этой команде. Так как это третья зависимая переменная в эксперименте было принято решение начать переход к фазе работы через пять дней после начала фазы работы со второй переменной (команда «Рядом» (движение)). Таким образом, работа со второй зависимой переменной начата спустя пять дней от начала работы с первой зависимой переменной, а работа с третьей – спустя пять дней после начала фазы работы со второй. Такие равные отрезки времени позволяют более наглядно представить данные.
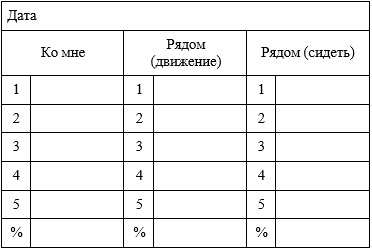
Метод наблюдения в эксперименте – количество. Так как самый валидный метод – окончательный продукт – в данном эксперименте использовать нельзя (ввиду отсутствия продукта), а задать параметры правильного выполнения собакой команд можно, как и возможно визуально отследить их, то был выбран подсчет количества правильно выполненных команд. Результаты фиксировались экспериментатором с помощью бланков наблюдения, специально подготовленных для данного наблюдения (Таблица № 1). Бланк представляет собой таблицу в верхней строчке, которой вписывается дата (рядом со словом «Дата»). Таблица разделена на три больших столбца с соответствующими зависимым переменным (командам) названиями: Ко мне, Рядом (движение) и Рядом (сидеть). Эти три столбца разделены еще на два: в одном из них вертикально размещены цифры от одного до пяти и знак %, что соответствует количеству проб, а второй столбец – пустой. В пустом столбце напротив соответствующей пробы ставится «+», если команда выполнена правильно, если команда выполнена неправильно – ничего не ставится. По завершению наблюдения подсчитывается количество «+» – правильно выполненных команд – и напротив знака % записывается процентное соотношение правильных проб к общему количеству.
Таблица № 1. Бланк наблюдения
Наблюдения проводились экспериментатором, который прошел два модуля обучения на образовательном курсе прикладного анализа поведения и продолжает обучение на третьем. И был привлечен еще один наблюдатель, который одновременно с экспериментатором фиксировал в своем бланке наблюдений результаты. Подготовка наблюдателя сводится к тому, что экспериментатор подробно объяснил суть эксперимента и показал видеоролики, представленные в сети Интернет, как именно правильно должны выглядеть команды.
Метод
Методом для обучения собаки и повышения ее мастерства в выполнении команд был выбран кликер-тренинг. Это один из наиболее мягких и эффективных методов, основанный на поощрении. Руководством для работы была книга основоположника этого метода Карен Прайор «Дрессировка собак с помощью кликера» (2005). Так этот метод построен на пищевом и условном поощрении, то необходимо было подобрать пищевое поощрение.
Поощрение Для применения этого метода было необходимо ввести новое для собаки условное поощрение – звук кликера (клик). Для этого необходимо безусловное поощрение – еда. Были выбраны кусочки печени: они имеют запах, привлекательный для собаки; собака не получает печень в обычном рационе (только за выполнение команд), а также кусочки печени удобны, так как собаке не приходится их жевать, а значит нет задержки после предоставления поощрения. В том, что печень является поощрением сомневаться не приходится, так как это безусловное поощрение. А для того, чтобы звук кликера стал поощрением, необходимо соединить эти два стимула. Соединение прошло классическим способом, в спокойной для собаки обстановке (дома): клик и незамедлительная подача кусочка печени. Через 10 повторений была сделана проверка: был подан клик и сделана пауза в подаче пищевого поощрения. Собака подняла уши, замерла в ожидании лакомства – это послужило сигналом, что клик стал условным поощрением. Каждый раз перед началом наблюдения собака получала одно такое соединенное поощрение (клик – кусочек печени) просто так, в качестве напоминания и укрепления связи между звуком и едой. Условное поощрение – клик – подавалось экспериментатором незамедлительно в момент правильного выполнения команды (FR1) на протяжении всего эксперимента. Пищевое поощрение вначале обучения также подавалось незамедлительно после клика (FR1). Но как только навык выполнения достиг 80% правильности, пищевое поощрение было поставлено на расписание VR2. Как только было два дня подряд наблюдений со 100% выполнением команды, расписание изменилось на VR3. Это было сделано с целью лучшего научения, закрепления навыка и повышения устойчивости к вымиранию.
Сбор данных начального уровня Сам ход эксперимента был разбит на две фазы: начальный уровень и фаза работы. Весь эксперимент проходил в одно и тоже время суток: наблюдения велись один раз в два дня (через день) на площадке посреди леса: безлюдное место, вдали от посторонних шумов. Для сбора начального уровня экспериментатор приходил вместе с испытуемой собакой на площадку. Приблизительно один раз в пять минут давалась команда. Время между ними варьировалось от 3 до 7 минут, чтобы собака не была привязана к одному расписанию и не научилась подходить к экспериментатору без команды, заранее. Собака свободно без поводка перемещалась по площадке. Экспериментатор давал команду и наблюдал, как ее выполняет собака. Результат записывался в бланк наблюдения. Так отмечались по 5 проб каждой из команд. Команды давались по очереди: вначале собирались данные по первой переменной (все пять проб), потом по второй и потом по третьей.
Фаза работы Фаза работы для первой зависимой переменной – команды «Ко мне» началась спустя пять дней эксперимента. Экспериментатор заблаговременно ввел новое условное поощрение для обучения по методу кликер-тренинга. Для этого был выбран день-перерыв между наблюдениями (09.10), чтобы не перегружать день наблюдения. 10 октября был первый день обучения собаки, а именно повышения мастерства выполнения команды «Ко мне». Первое поощрение клик-еда собака получила просто так, без команды и была отпущена по команде «Гуляй». Спустя три минуты экспериментатор подал команду «Ко мне», при этом зажал кусочек печени в левой руке и расположив руку спереди, по центру своего тела. Собака подбежала, принюхалась к руке. В этот момент экспериментатор поднял руку и направил ее вперед, заставляя собаку запрокинуть голову и сесть. Как только собака села – поощрение – клик-еда. Еда была в руке только в первый день обучения, далее подсказка была уменьшена до такого же жеста рукой, но без кусочка печени, а после и вовсе убрана.
Фаза работы для второй переменной – команда «Рядом» (движение) – началась спустя пять дней после начала фазы работы с первой переменной. Экспериментатор подзывал собаку с помощью клички, заблаговременно зажав кусочек печени в левой руке и опустив ее вдоль левого бедра. Когда собака подходила на зов, она уже была настроена на поиск еды и быстро обнаруживала ее слева. Это помогало ей занять приближенную к правильной позицию слева. Экспериментатор давал команду «Рядом» и начинал движение. В отличие от первой команды здесь важно подкреплять не конечный результат команды, а процесс ходьбы рядом. Собака следовала рядом, как только она занимала правильную позицию относительно человека (как описано в секции «Метод наблюдения»), экспериментатор поощрял – кликом и останавливался, чтобы дать кусочек печени. Так же как с командой «Ко мне» подсказка с едой в руке была убрана.
Фаза работы для третьей переменной – команда «Рядом» (сидеть) – началась спустя пять дней после начала фазы работы со второй переменной. Эта команда отличается от предыдущих тем, что она новая для собаки. Соответственно, если в первых двух случаях собака была знакома с голосовыми командами «Ко мне» и «Рядом» и нужно было научить ее делать правильно, то команда «Рядом» (сидеть) неизвестна, у нее нет стимула, который будет запускать поведение. Для лучшего различения собакой стимулов (две команды в эксперименте звучат в голосовой команде одинаково) был выбран стимул хлопок левой рукой по левому бедру экспериментатора. Собаки прекрасно различают жесты и при должном обучении могут ориентироваться только на них без голосовых команд. Поэтому это не вызывало затруднений. Начало обучения было такое же, как при команде «Рядом» (движение). Экспериментатор подзывал собаку с помощью клички, заблаговременно зажав кусочек печени в левой руке и опустив ее вдоль левого бедра. Когда собака подходила на зов, она уже была настроена на поиск еды и быстро обнаруживала ее слева. Как только собака оказывалась слева, экспериментатор жестом левой руки «вынуждал» ее сесть (так же как с командой «Ко мне»). Как только собака садилась слева – клик-еда. Как только собака впервые села сама, без жеста, экспериментатор стал шейпить это поведение, таким образом, чтобы собака заняла правильную позицию. Каждое правильное приближение подкреплялось кликом-едой, неправильная позиция – не поощрялась, что вызывало множество движений у собаки, а это в свою очередь позволяло поймать момент приближения к правильному выполнению. Таким образом, собака «распознала», что когда ее зовут, и никакой команды не следует, нужно сесть слева (как описано в команде «Рядом» (сидеть)). Как только показатель правильности достиг 80%, был введен отличительный стимул для этого поведения, то есть сама команда (хлопок по бедру). Экспериментатор подзывал собаку и хлопал рукой, собака по-наученному садилась слева. После, используя выборочное усиление, собака поощрялась только за выполнение команды после хлопка по бедру, а без этого жеста – не поощрялась.
Перекрестное наблюдение За экспериментом наблюдало два человека: экспериментатор и наблюдатель. Перекрестные наблюдения проводились три раза: 30.09, 30.10 и 01.12. Использование графика наглядно отражает надежность по независимым переменным: до перехода на фазу работы независимые переменные остаются неизменными, а при переходе на фазу работы изменения схожи. Пищевое поощрение было подобрано правильно, так как собака за него работает с высокой мотивацией. Расписание поощрения также было хорошо подобрано, так как в противном случае это привело бы к вымиранию поведения. Условное поощрение было введено в соответствии с методологией и работало как поощрение: поведение повторялось. Данный эксперимент весьма далек от обобщенного вывода. Это частный результат для конкретного испытуемого. При этом нет противоречий для повторения и проверки надежности по зависимым переменным, а попутно и по независимым.
Дизайн Для эксперимента был выбран множественный начальный уровень для одного испытуемого и трех его поведений. Этот дизайн был выбран, так как для данного эксперимента невозможно выбрать возвратный дизайн как наиболее валидный. В данном эксперименте идет обучение навыкам, а значит возврат на начальный уровень невозможен. В таком случае используется множественный начальный уровень как следующий после возвратного по показателю валидности. Данный дизайн позволяет избежать двоякости в интерпретации результатов, так как работа с каждой из зависимых переменных начинается по очереди, а результаты наглядно представляются на одном графике. При переходе на фазу работы одна переменная начинает меняться, а две другие переменные остаются неизменными. Когда ко второй зависимой переменной применяется та же методика, переменная начинает меняться, а третья так и остается неизменной. В итоге мы наблюдаем как все три зависимые переменные меняются под действием одной независимой. Это исключает двоякость интерпретации. Для данного дизайна минимальным условием является три начальных уровня (три независимые переменные), что соблюдено. Данный дизайн доказывает гипотезу о том, что с помощью кликер-тренига можно обучить пожилую собаку новой команде и увеличить мастерство выполнения наученных команд с начального уровня до 100%. Так как при работе с одной зависимой переменной другие оставались неизменными.
Результаты
На графике № 1 представлены фазы эксперимента. На горизонтальной оси отмечены даты, когда проходил эксперимент, на вертикальной оси – процентное отношение правильного выполнения команд к общему числу проб (5 проб – 100%). Зеленой вертикальной чертой отмечено окончание фазы сбора начального уровня и начало фазы работы. В эксперименте принимал участие один испытуемый, взяты в эксперимент три навыка. На начальном уровне можно наблюдать, что по командам «Ко мне» и «Рядом» (движение) у испытуемого есть процент правильного выполнения, а у команды «Рядом» (сидеть) 0% правильного выполнения.
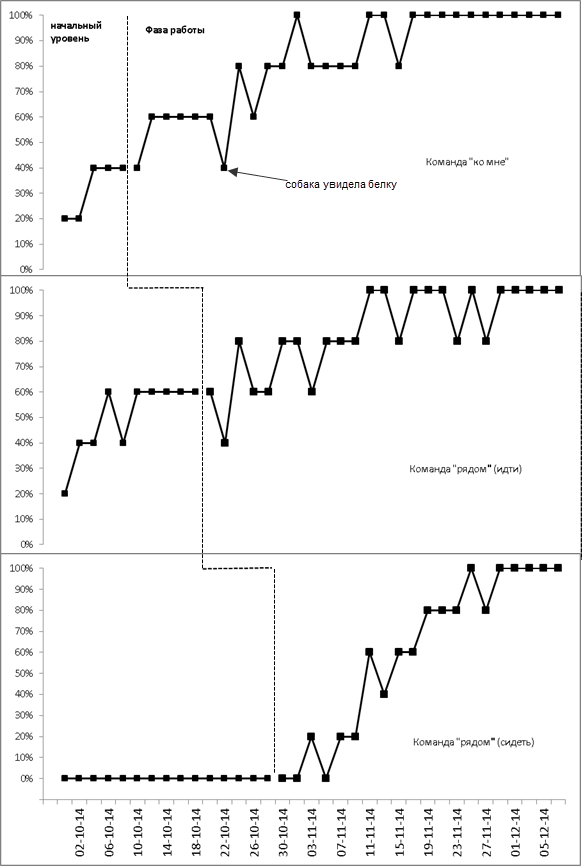
График 1. Фазы эксперимента
На начальном уровне команды «Ко мне» три последние точки находятся на одном уровне, что говорит о стабильности и позволяет перейти к фазе работы. Так же у второй переменной (команда «Рядом» (движение)) – пять точек на одном уровне – также стабильность. Начальный уровень команды «Рядом» (сидеть) полностью нулевой.
Первый график (команда «Ко мне») на фазе работы имеет две общие точки, одна из которых подписана на графике – «собака увидела белку», то есть в эксперимент вмешался посторонний стимул, влияющий на результат. Первые семь дней фазы работы научение остановилось практически на одном уровне (2 – 3 правильных выполнения команды), после чего наблюдается скачкообразный подъем, который опять «застревает» на одном уровне на три дня, после чего навык достигает 100%.
Второй график (команда «Рядом» (движение)) на фазе работы имеет четыре общие точки с начальным уровнем и одну ниже него (подписана «собака увидела белку»). В течение 11 дней фазы навык колеблется между 60% и 80% после чего достигает отметки 100%, но продолжает колебаться. Достигает стабильных 100% в последние 5 дней эксперимента.
Третий график (команда «Рядом» (сидеть)) на фазе работы также имеет три общие точки с начальным уровнем. После второй отметки 0% навык начинает поступательно расти и последние 5 дней эксперимента останавливается на 100%.
Все три графика имеют стабильные участки в начальном уровне, но не разделены. По ним можно проследить общую закономерность: при переходе на фазу работы навык улучшается до 100%.
В самом начале статьи был поднят вопрос о том насколько можно исправить уже наученное поведение у пожилой собаки и научить ее новому. В данном частном случае, сравнивая результаты обучения трем командам, можно сделать следующие выводы: 1) возможно модифицировать уже наученное поведение пожилой собаки и научить ее совершенно новой команде, 2) возможно применение только поощрительного метода в обучении (а именно кликер-тренинга). Это важный результат, хоть он и пока ничего не доказывает в отношении других собак. Это возможность для дальнейших экспериментов. Ведь нередко дрессировка животных далека от гуманизма, и крайне редко хозяева животных представляют себе этот процесс интересным и приятным для собаки. Также во время анализа результатов было отмечено, что усвоение новой команды происходит быстрее, чем изменение наученного поведения. Это классический вывод для прикладного анализа поведения. Однако в этом в эксперименте испытуемым была пожилая собака, но все же способная к обучению. В России нет экспериментов доказывающих или опровергающих эффективность тех или иных методов дрессировки. Вне сомнений, что признанный стандарт ОКД – это работающая модель, использующая уже давно и имеющая свои результаты. Однако этот метод использует наказание, что не может не повлечь за собой различные побочные эффекты. К тому же отечественных исследований сравнивающих скорость освоения навыков с помощью контрастного и поощрительного подхода нет.
ОБСУЖДЕНИЕ
Результаты этого эксперимента нельзя применять к другим собакам. Для этого требуется повторение эксперимента (проверка на надежность по зависимым переменным).
В данном эксперименте много условных факторов, которые могли сказаться на результатах: то, что экспериментатор является проводником собаки, недостаточный контроль посторонних стимулов, могущих оказать влияние на ход эксперимента, недостаточное количество перекрестных наблюдений.
Вначале планирования эксперимента предполагалось сравнить обучение новой команде троих испытуемых (двух пожилых собак и одной молодой), но, к сожалению, третий испытуемый (желающий) не был найден. В этом случае можно было бы сравнить скорость обучения новому. Также можно было бы сделать сравнение разных методов дрессировки и сравнить результаты. Интересно было бы взять в эксперимент нежелательные поведения пожилых собак и модифицировать их с помощью выборочного усиления: без использования наказания и ограничивающих приспособлений, к примеру, электрошоковые ошейники, клетки, что имеет большое распространение среди владельцев собак. Тема дрессировки и обучения собак одна из важнейших тем собаководства, при этом научных исследований не достаточно, скорее все сводится к личному опыту инструкторов по дрессировке.
Литература
Бондарева А. «Основы кликер-тренинга» http://www.agility.ru/School/r_L201.htm (полностью звучит вот так: Комитет по образованию и науке администрации г. Перми Муниципальное образовательное учреждение дополнительного образования детей “Дворец творчества юных” г. Перми Военно-спортивный отдел Секция: “Мир моих увлечений” Основы кликер-тренинга. Автор: Бондарева Анна, Клуб юных собаководов, Научный руководитель: Рудашевский Михаил Александрович, Педагог ГДТЮ. Пермь, 2002)
Журавлев А. «Отрицательное подкрепление в кликер-тренинге», портал «Мир собак» от 11.03. 2011 http://mirsobak.org.ru/1343-uroki-kliker-treninga-komanda-ko-mne/
Прайор К. «Дрессировка собак с помощью кликера», Аквариум-Принт; Москва; 2005
Blackwell E. J., Bolster C., Richards G., Loftus B. A., and Casey R. A. (2012). «The use of electronic collars for training domestic dogs: estimated prevalence, reasons and risk factors for use, and owner perceived success as compared to other training methods» Published online 2012 June 29
Herron M., Shofer F., & Reisner I. (2009). «Survey of the use and outcome of confrontational and non-confrontational training methods in client-owned dogs showing undesired behaviors», Appl Anim Behav Sci.